Fast Simulation of Deformable Characters with Articulated Skeletons in Projective Dynamics
|
|
|
|
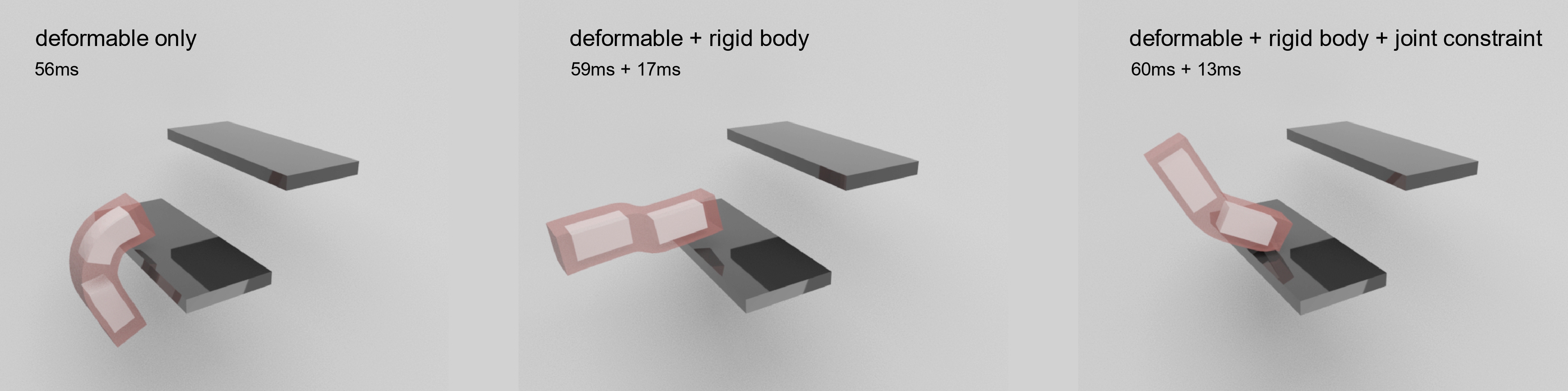 |
AbstractWe propose a fast and robust solver to simulate continuum-based deformable models with constraints, in particular, rigid-body and joint constraints useful for soft articulated characters. Our method embeds degrees of freedom of both articulated rigid bodies and deformable bodies in one unified optimization problem, thus coupling the deformable and rigid bodies. Our method can efficiently simulate character models, with rigid-body parts (bones) being correctly coupled with deformable parts (flesh). Our method is stable because backward Euler time integration is applied to rigid as well as deformable degrees of freedom. Our method is rigorously derived from constrained Newtonian mechanics. In an example simulation with rigid bodies only, we demonstrate that our method converges to the same motion as classical explicitly integrated rigid body simulator. Publication
Jing Li, Tiantian Liu, Ladislav Kavan.
Fast Simulation of Deformable Characters with Articulated Skeletons in Projective Dynamics.
Symposium on Computer Animation [Honorable Mention], 2019.
Links and DownloadsAcknowledgementsWe thank for Eftychios Sifakis many inspiring discussions. We also thank Pia Krensel for mermaid modelling, and Henry Rietra for snail modelling, Dimitar Dinev, Wenxian Guo for proofreading, Dimitar Dinev for narrating the accompanying video. This material is based upon work supported by the National Science Foundation under Grant Numbers IIS-1617172, IIS-1622360 and IIS-1764071. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation. We also gratefully acknowledge the support of Activision, Adobe, and hardware donation from NVIDIA Corporation. |